
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Why I want to become an expert in robotics software engineer?
Published:
Motivation
My 5 Strength Point
Published:
Strength Points
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
SLAM Based Mobile Robot Navigation for Airport Robotics Model Prototyping
Research Project  ”
”
Line Following Robot using PID Controller
Robotisim Project  ”
”
LQR Controller Implementation for Mobile Robotics Behaviour
Robotisim Project 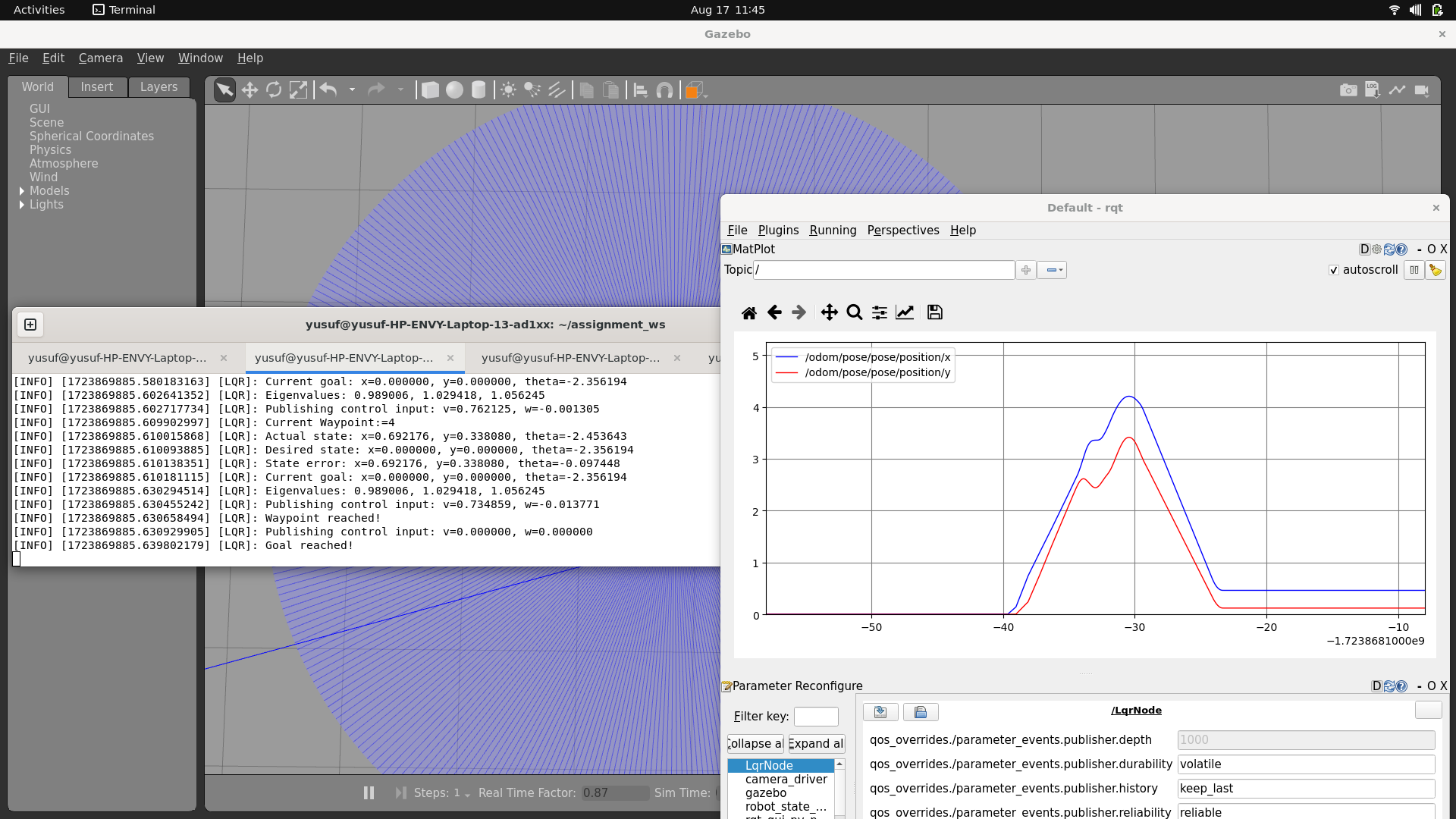 ”
”
Sensor Fusion Implementation for Robot Navigation
Robotisim Project  ”
”
(Research Assistant) Multiple Model Approach of A Soft Robotic Arm
Research Assistant  ”
”
(Research Assistant) Soft-Growing Robot Navigation in Unknown Environment via Deep Reinforcement Learning
Research Assistant 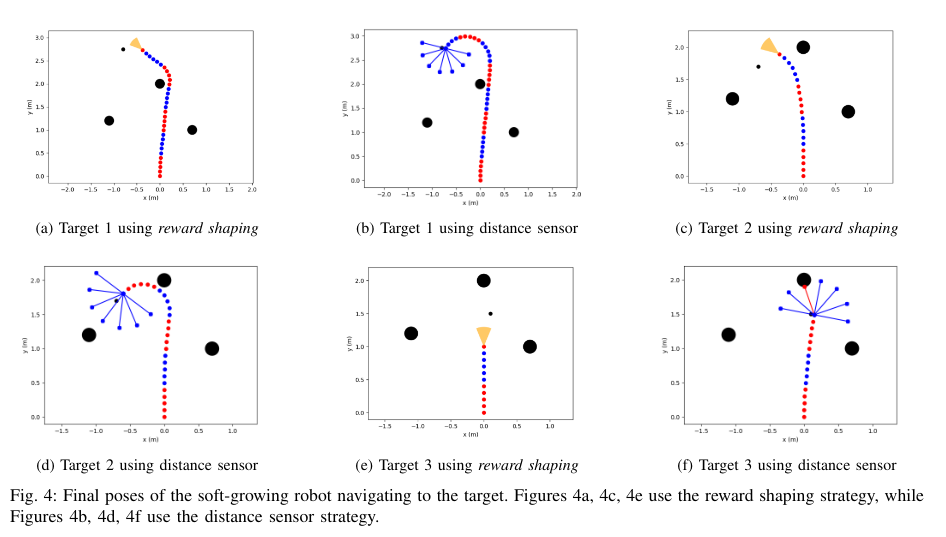 ”
”
(Research Assistant) Upper Limb Rehabilitation Robot Control based on Large Language Model
Research Assistant 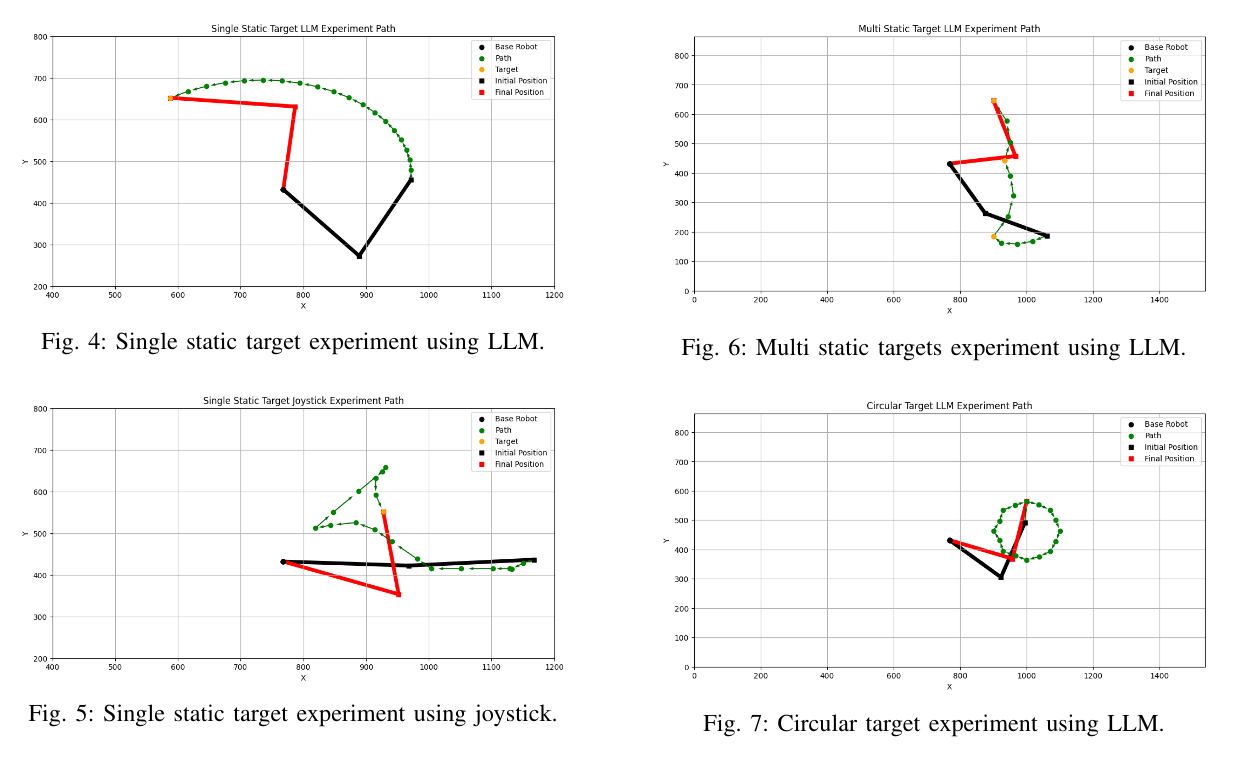 ”
”
Deep-Q-Network for Mobile Robotics Navigation
Research Project  ”
”
SLAM and Obstacle Avoidance Implementation on The Construct Platform
Student Project  ”
”
Custom Automatic Light Sensor Holder using CNC
Company Project  ”
”
publications
Paper Title Number 2
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2).
Download Paper | Download Slides
Paper Title Number 3
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3).
Download Paper | Download Slides
Reward Shaping for Mobile Robot Navigation Based on Deep Reinforcement Learning.
Published in Researchgate, 2024
Abstract: In recent years, various robot navigation method has been proposed, including the use of SLAM (Simultaneous Localization and Mapping), various path planning approaches such as A* or Djikstra, and obstacle avoidance methods such as an Artificial Potential Field. A navigation method is important for mobile robots to navigate autonomously. However, there are still challenges to including various constraints and diverse sensor data in the navigation process, particularly if no maps of the environment are available. The characteristic of an uncertain environment led to the development of a navigation method with Deep Reinforcement Learning (DRL). However, to solve the navigation problem, the DRL algorithm needs a reward shaping that generates a suitable reward function with limited observation data. In this paper, we proposed reward shaping for Deep Q Network (DQN), which is one of the methods of the DRL algorithm to perform navigation for a mobile robot. The goal of the algorithm is to achieve a specific position with optimum accuracy on a 2-dimensional space, making use of positioning data only. We compared a positive and negative reward function to train the DQN. We also compare two types of robot observation. We have successfully achieved the best performance of positioning with 87.2% accuracy.
Recommended citation: MBadriawan, Yusuf & Cahyadi, Adha & Rizqi, Ahmad Ataka Awwalur & Setiawan, Noor. (2023). "Reward Shaping for Mobile Robot Navigation Based on Deep Reinforcement Learning." Conference 1. 1(1).
Download Paper
talks
Certification
- For all of my certification evidence, kindly check my Linkedin Account.
Software Competencies
- Robot Operating Sistem (ROS)
- ROS 2 (Python/C++)
- Pybullet Sim
- Gazebo Sim
- Rviz 2
- Tensorflow
- Google Collab
- Matlab
- Arduino IDE
- Linux bash script
- Wordpress
- Canva
- Latex
- Microsoft Office
Languages
- English = Proficient
- Indonesian = Native
- Japanese = Basic
- Chinese = Basic
Skills
- Navigation
- Reinforcement Learning
- Control Theory
- Mathematical modelling
- Simultaneous Localization and Mapping
- Linear Algebra
- Programming
- Machine Learning
- Web services API
- Business Development
- Project Management
- Teaching and Mentoring
- Leadership
- Public Speaking
- Presentation
teaching
Teaching Experience 2
Children Course, Robotik Academy Indonesia, 1900
STEM Educator and Curriculum Designer (2021-2023)
Teaching Experience 1
Workshop, Universitas Gadjah Mada, Electrical Engineering and Information Engineering, 1900